OpenCV 5: Bilgisayarlı Görünün Temel Taşı, On Yılın En Büyük Güncellemesini Aldı
OpenCV 5, Haziran 2026'da yayınlanan en büyük güncellemesiyle geliyor: Yeniden yazılan DNN motoru (%80+ ONNX kapsamı), yerleşik LLM/VLM desteği, yeni donanım soyutlama katmanı ve radikal modül sadeleşmesiyle bilgisayarlı görünün temel taşı yeniden şekilleniyor.
OpenCV 5: Bilgisayarlı Görünün Temel Taşı, On Yılın En Büyük Güncellemesini Aldı
Bir görüntü işleme pipeline'ı kurdunuz. ONNX modelinizi OpenCV'ye yüklemeye çalışıyorsunuz. Hata. "Unsupported operator." Yine. OpenCV 4.x'in DNN modülü ONNX operatörlerinin yalnızca %22'sini destekliyordu. Geliştiriciler olarak yıllardır aynı senaryoyu yaşadık: modern bir modeli OpenCV'nin içinde çalıştırmak istediğimizde ya PyTorch'a geri döndük, ya ONNX Runtime'ı ayrıca kurduk, ya da model mimarisini OpenCV'nin anlayacağı şekilde budadık.
OpenCV 5, tam olarak bu acıyı bitirmek için geldi. Haziran 2026'da CVPR Denver'da duyurulan ve 8 Haziran'da pip üzerinden yayınlanan bu sürüm, kütüphanenin 2000 yılında Gary Bradski tarafından Intel bünyesinde başlatılmasından bu yana geçen en kapsamlı modernizasyonu temsil ediyor. Bradski'nin kim olduğunu bilmeyenler için: Kendisi OpenCV'nin kurucusu olmasının yanı sıra Willow Garage'da robotik vizyon ekibini yönetmiş, Industrial Perception'ı kurmuş ve hala OpenCV.org'un başkanlığını yürüten bir bilgisayarlı görü duayeni. Stanford'ta misafir araştırmacı olarak da görev yapan Bradski, 25 yıldır bu kütüphanenin vizyonunu şekillendiriyor.
Bu yazıda OpenCV 5'in yeniden yazılan DNN motorunu, yerleşik LLM/VLM desteğini, yeni donanım soyutlama katmanını, performans rakamlarını, modül yapısındaki radikal sadeleşmeyi ve geliştirici deneyimindeki değişiklikleri derinlemesine inceleyeceğiz.
86 Bin Yıldız, 1 Milyon Günlük İndirme: Neden OpenCV Hala Tahtta?
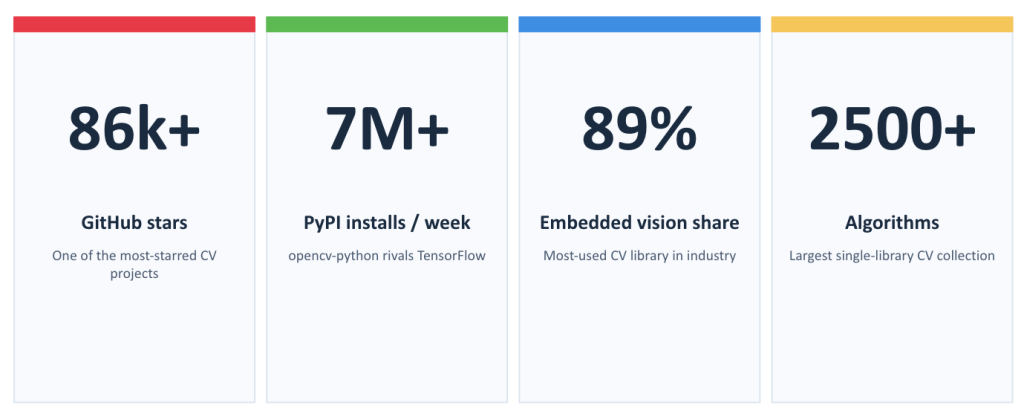
OpenCV'yi "eski bir kütüphane" olarak görmek kolay. Sonuçta 25 yıllık bir geçmişi var. Ama rakamlar başka bir hikaye anlatıyor: 86.000'den fazla GitHub yıldızı, günde 1 milyondan fazla indirme. Robotikten tıbbi görüntülemeye, endüstriyel denetimden artırılmış gerçekliğe, otonom araç araştırmalarından akıllı telefon kameralarına kadar OpenCV, bilgisayarlı görünün temel taşı olmayı sürdürüyor. Peki bu kadar yaygın bir kütüphane neden şimdiye kadar böyle bir güncelleme almadı?
Cevap basit: OpenCV o kadar derine gömülü ki, her değişiklik milyonlarca sistemi etkileyebilir. Kütüphanenin geliştirilmesi OpenCV.org çatısı altında, Big Vision, OpenCV China ve OpenCV.ai ekipleri tarafından yürütülüyor. Bu kadar geniş bir kullanıcı tabanına sahip bir kütüphanede değişiklik yapmak, yürüyen bir trene ray değiştirmek gibi. OpenCV 5 ekibinin başarısı tam da burada: geriye dönük uyumluluğu korurken, kütüphanenin neredeyse her katmanını modernize ettiler.
Yeni DNN Motoru: %22'den %80+ ONNX Kapsamına
OpenCV 5'in en büyük hikayesi, sıfırdan yeniden yazılan derin sinir ağı (DNN) çıkarım motoru. Eski motorun nasıl çalıştığını hatırlayalım: Katmanlar düz bir liste halinde tutulur, teker teker işlenirdi. Şekil çıkarımı yoktu, dinamik boyutlar desteklenmezdi, kontrol akışı (If/Loop) tamamen imkansızdı. Sonuç: Modern modellerin büyük çoğunluğu OpenCV'de çalışmıyordu. Dahası, quantize edilmiş modeller (QDQ formatında) hiç desteklenmiyor, alt grafikler (subgraph) yüklenemiyordu.
Yeni motor ise tiplendirilmiş bir işlem grafiği (typed operation graph) inşa ediyor. Bu, derleyici dünyasından bildiğimiz bir yaklaşım: Motor artık modelin tamamını bir bütün olarak analiz edebiliyor. Gelelim detaylara:
- Sembolik şekil çıkarımı (symbolic shape inference): Dinamik boyutları henüz grafik oluşturulurken çözümleyebiliyor. Bu, batch size'ı runtime'da değiştirebilen modeller için kritik.
- Sabit katlama (constant folding): Gereksiz hesaplamaları daha çalıştırma başlamadan eliyor. Örneğin, modelin içinde sabit bir değerle çarpma varsa, bu işlem model yüklenirken yapılıp sonuç doğrudan grafiğe gömülüyor.
- Operatör füzyonu: QDQ (Quantize/Dequantize), BatchNorm, Attention, MatMul, Softmax gibi operatör zincirlerini tek bir kernel'da birleştiriyor. Bu, belleğe gidip gelme sayısını azaltarak çarpan etkisi yaratıyor.
- Birleşik bellek havuzu: Katmanlar arası bellek tahsisini agresif şekilde yeniden kullanıyor. Eski motorda her katman kendi belleğini alıp bırakırken, yeni motor tek bir havuzdan çekip geri veriyor.
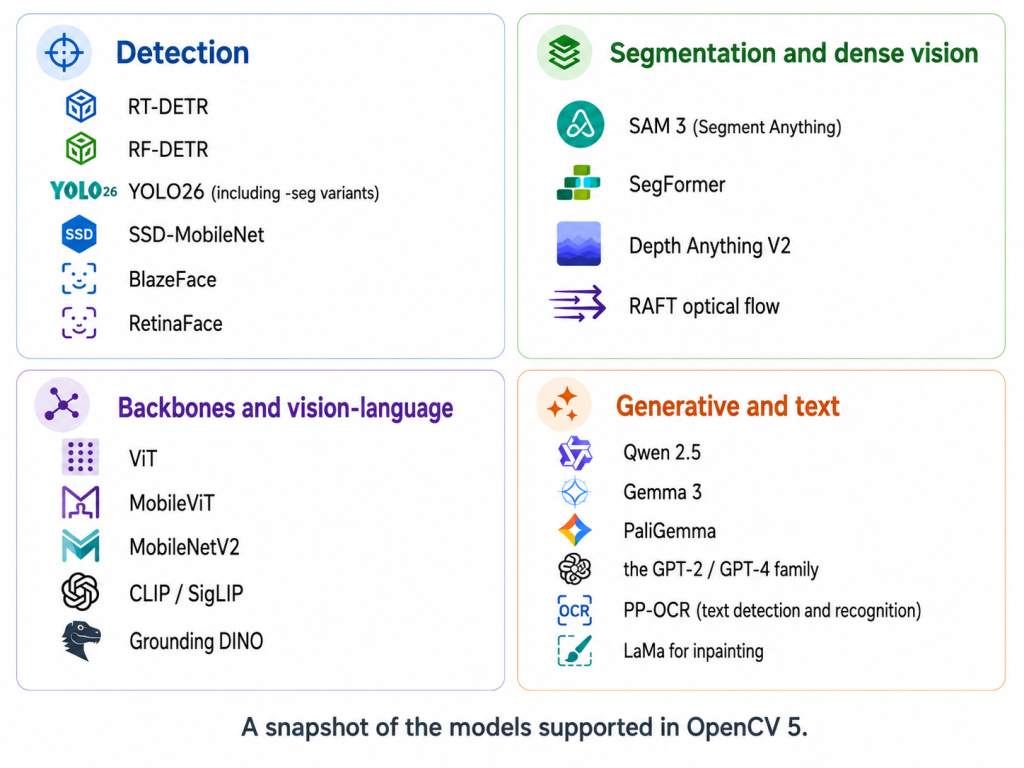
Buradaki en kritik rakam ONNX operatör kapsamı: %22'den %80'in üzerine çıktı. Bu, OpenCV tarihindeki en büyük tek seferlik iyileştirme. Geliştiriciler olarak artık YOLO serisinden DINOv2'ye, SAM'dan OWLv2'ye, BiRefNet'ten Qwen2.5'a kadar onlarca modern modeli OpenCV içinde, hiçbir harici bağımlılık olmadan çalıştırabiliyoruz.
FlashAttention Tarzı Füzyon: Transformer'lara Bedava Hız
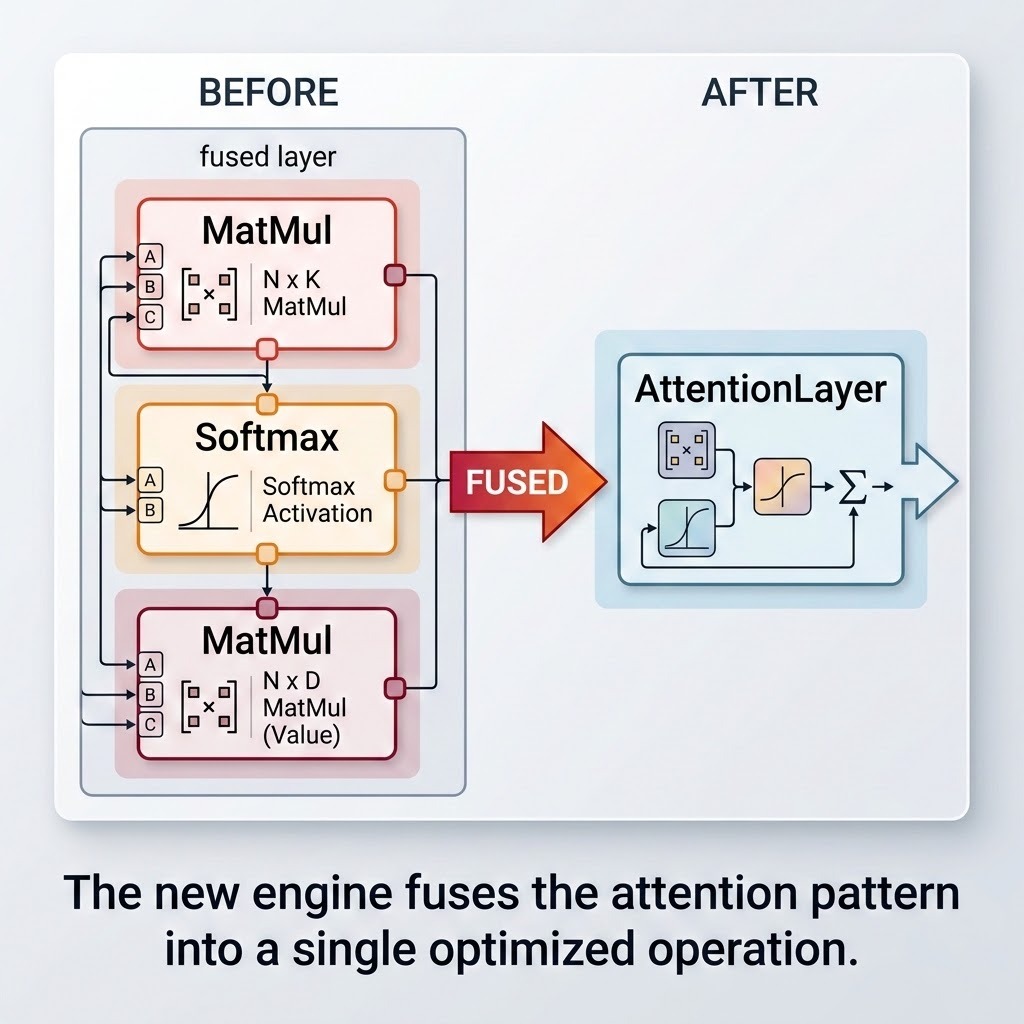
Yeni motorun en zekice özelliklerinden biri attention füzyonu. Motor, MatMul → Softmax → MatMul zincirini tanıyıp bunu tek bir FlashAttention benzeri operasyona dönüştürüyor. Bu, herhangi bir transformer tabanlı model için ek kod yazmadan gelen bir hızlanma anlamına geliyor. Daha önce FlashQLA yazımızda incelediğimiz linear attention kernel optimizasyonları gibi düşünün; ama bu sefer füzyon, OpenCV'nin kendi motoru tarafından otomatik olarak yapılıyor. Geliştirici olarak sizin hiçbir şey yapmanıza gerek yok. Modeli yükleyin, motor tanısın, füzyonu uygulasın.
Üç Motor, Tek API
OpenCV 5, geriye dönük uyumluluğu zekice bir mekanizmayla sağlıyor: motor seçimi. readNetFromONNX() çağrısına bir engine parametresi eklenmiş durumda:
ENGINE_CLASSIC (1): Eski 4.x motoru, CUDA/OpenVINO backend desteğiyleENGINE_NEW (2): Yeni graph motoru, şimdilik yalnızca CPUENGINE_AUTO (3): Varsayılan. Önce yeniyi dener, başarısız olursa klasiğe dönerENGINE_ORT (4): Dahili ONNX Runtime sarmalayıcısı (WITH_ONNXRUNTIME=ONile derlenmeli)
Pratikte bu ne anlama geliyor? Mevcut OpenCV 4.x kodunuz ENGINE_AUTO sayesinde hiçbir değişiklik yapmadan yeni motorun avantajlarından faydalanmaya başlıyor. Sadece pip install opencv-python-headless==5.0 yapmanız yeterli. C++ tarafında da aynı basitlik geçerli:
#include <opencv2/dnn.hpp>
using namespace cv;
// Varsayılan davranış (ENGINE_AUTO): önce yeni, sonra klasik
dnn::Net net = dnn::readNetFromONNX("model.onnx");
// İsterseniz yeni motoru doğrudan seçebilirsiniz
// dnn::Net netNew = dnn::readNetFromONNX("model.onnx", dnn::ENGINE_NEW);
net.setInput(blob);
Mat out = net.forward();Önemli not: Yeni motor şu anda yalnızca CPU üzerinde çalışıyor. Eğer CUDA veya OpenVINO backend'i kullanıyorsanız, ENGINE_CLASSIC veya ENGINE_ORT ile devam etmeniz gerekiyor.
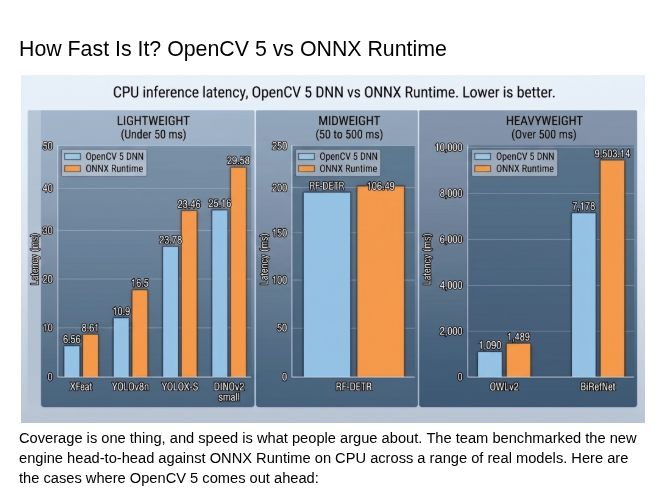
Performans: ONNX Runtime'ı Sollayan Yerli Motor
OpenCV 5 ekibi, yeni DNN motorunu Intel Core i9-14900KS üzerinde ONNX Runtime 1.25.1 ile kapsamlı bir şekilde karşılaştırmış. Sonuçlar etkileyici:
- XFeat: 6.56 ms vs 8.61 ms (%31.3 daha hızlı)
- OWLv2: 1.090 ms vs 1.489 ms (%36.6 daha hızlı)
- BiRefNet: 7.178 ms vs 9.503 ms (%32.4 daha hızlı)
- DINOv2 small: 23.78 ms vs 29.58 ms (%24.4 daha hızlı)
- YOLOv8n: 10.9 ms vs 12.15 ms (%11.5 daha hızlı)
Bu özellikle dikkat çekici çünkü ONNX Runtime, Microsoft tarafından yıllardır optimize edilen, endüstri standardı bir çıkarım motoru. OpenCV 5'in sıfırdan yazılmış CPU motoru, birçok modern modelde bu standardı geçebiliyor. Dahası, tüm bunları tek bir bağımlılıkla yapıyorsunuz: sadece OpenCV.
i7 sonuçları da benzer bir pattern gösteriyor; özellikle YOLOv4, OWLv2, BiRefNet ve Fast Neural Style modellerinde OpenCV 5 açık ara önde. Tam benchmark tablosuna GitHub Wiki'den ulaşabilirsiniz.
OpenCV'nin İçinde LLM ve VLM Çalıştırmak
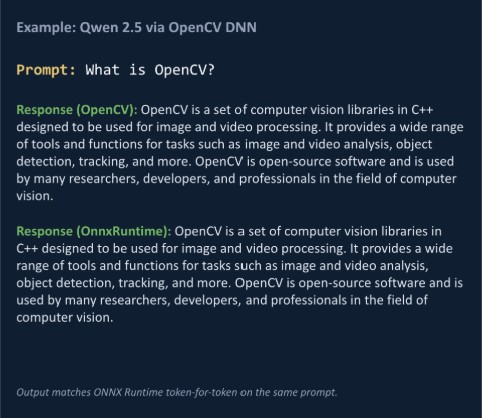
Bir bilgisayarlı görü kütüphanesinin içinde büyük dil modelleri çalıştırmak kulağa tuhaf gelebilir. Ama OpenCV 5 ekibi tam olarak bunu yaptı. Yeni DNN motoru artık yerleşik tokenizer, attention katmanları, decoding blokları ve KV-cache desteğiyle geliyor. Bu bileşenler sayesinde, daha önce sadece PyTorch veya Hugging Face transformers gibi ağır framework'lerin yapabildiği çıkarım işlemleri, artık OpenCV'nin kendi içinde, C++ veya Python ile yapılabiliyor.
Bu ne işe yarıyor? Artık bir görüntü işleme pipeline'ının son adımında, görüntüyü analiz edip metin çıktısı üreten bir VLM'yi (Vision Language Model) OpenCV'nin içinde, hiçbir harici framework kurmadan çalıştırabiliyorsunuz. Qwen2.5, Gemma 3, PaliGemma gibi modeller doğrudan OpenCV 5 DNN motorunda, ONNX formatında çalışıyor. Test edilen modeller arasında metin tanıma, görüntü açıklama ve görsel soru cevaplama gibi multimodal görevleri kapsayan geniş bir yelpaze var.
Bu, küçük dil modellerinin (SLM) verimliliği üzerine yazdığımız yazıda bahsettiğimiz trendle bire bir örtüşüyor: Büyük modeller edge cihazlara iniyor ve OpenCV 5 bu geçişin kritik bir kolaylaştırıcısı olarak konumlanıyor. Özellikle robotik ve gömülü sistemlerde, bir görüntüyü alıp "bu rafta 3 adet kırmızı kutu var" diye çıktı veren bir sistemi tek bir C++ binary'si ile çalıştırabilmek, deployment karmaşasını dramatik şekilde azaltıyor.
Yeni Donanım Soyutlama Katmanı (HAL)
OpenCV 5'in bir diğer büyük yeniliği, baştan tasarlanan Donanım Soyutlama Katmanı (HAL). Eski HAL, donanım hızlandırıcılarını entegre etmeyi zorlaştıran monolitik bir yapıya sahipti. Yeni HAL ise plug-and-play vendor kernel'ları felsefesiyle tasarlanmış. Bu, donanım üreticilerinin kendi optimize kernel'larını OpenCV'ye eklemesini çok daha kolay hale getiriyor.
Şu anda optimize edilmiş çalışma yolları şunları kapsıyor:
- Intel IPP (SSE/AVX ile optimize edilmiş kernel'lar)
- Arm KleidiCV (Arm işlemciler için özel optimizasyonlar)
- Qualcomm FastCV (Snapdragon ve benzeri mobil platformlar)
- RISC-V Vector (RVV) uzantıları (açık kaynak donanım ekosistemi için stratejik)
Bu liste özellikle edge deployment açısından kritik. Raspberry Pi'den Qualcomm tabanlı drone'lara, RISC-V tabanlı gömülü sistemlerden Intel sunuculara kadar aynı OpenCV kodunun her platformda optimize çalışabilmesi, geliştiriciler olarak bizim için büyük bir kazanım. Özellikle RISC-V desteği, açık kaynak donanım hareketiyle uyumlu olarak ileriye dönük stratejik bir hamle.
Çekirdek Modernizasyonu: C++17, Yeni Veri Tipleri, 0D Diziler
OpenCV 5, perde arkasında büyük bir temizlikten geçti. En radikal değişiklik: C API tamamen kaldırıldı. cvCreateMat(), cvFindContours() gibi OpenCV 1.x döneminden kalma fonksiyonlar artık yok. Python 2 desteği de tamamen sonlandırıldı; minimum Python 3.6, önerilen ise Python 3.10 ve üzeri.
Yeni veri tipleri eklendi: bfloat16, uint32, uint64, int64 ve boolean matrisler. Özellikle CV_Bool tipi ilginç: Artık bir mask matrisini uchar'a cast etmeden doğrudan maske olarak kullanabiliyorsunuz. BF16 desteği ise modern AI modellerinin düşük hassasiyetli çıkarımı için kritik; birçok transformer modeli BF16 formatında çalışacak şekilde eğitiliyor. cv::hfloat ve cv::bfloat üzerinde aritmetik işlemler, donanım desteği olmasa bile her zaman kullanılabilir durumda.
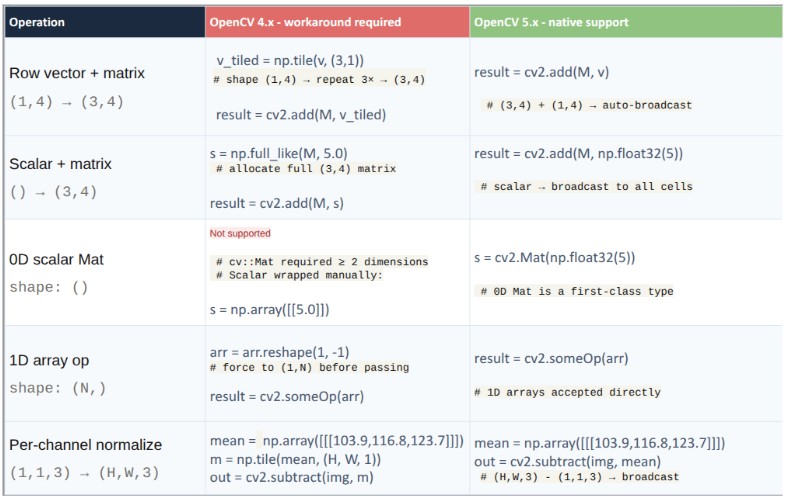
Bir diğer önemli değişiklik: 0D ve gerçek 1D dizi desteği. Eski OpenCV'de std::vector her zaman 2B matrise (Nx1 veya 1xN) dönüştürülürdü. Artık gerçek 1D diziler (dims == rows == 1) ve hatta 0D skalerler (dims == 0) destekleniyor. Bu, DNN şekil çıkarımı sırasında gereksiz boyut dönüşümlerini ortadan kaldırarak hem performansı artırıyor hem de hata olasılığını azaltıyor. MatSize yapısı da MatShape ile değiştirilmiş; yeni yapı şekil bilgisini ve veri düzenini doğrudan Mat, UMat ve GpuMat içine gömüyor, ek dinamik bellek tahsisi yapmıyor.
Modül Yapısında Radikal Sadeleşme
OpenCV 4.x'teki calib3d modülü tam bir canavardı: kamera kalibrasyonu, stereo eşleştirme, 3B rekonstrüksiyon, görsel odometri hepsi tek bir modüldeydi. OpenCV 5 bunu dört ayrı modüle böldü:
- geometry: 2B/3B/nB geometrik algoritmalar, dışbükey örtü (convexHull), Delaunay üçgenlemesi
- calib: Kamera kalibrasyonu, çoklu kamera kalibrasyon pipeline'ı
- stereo: Stereo derinlik çıkarımı, eşleme algoritmaları
- ptcloud: Nokta bulutu işleme, TSDF (Truncated Signed Distance Function), ICP (Iterative Closest Point), PLY/OBJ import/export
features2d modülü de features olarak yeniden adlandırıldı ve kapsamı genişletildi. Yeni eklenen ALIKED, DISK ve LightGlue gibi derin öğrenme tabanlı lokal öznitelik çıkarıcılar ve eşleştiriciler, klasik SIFT/ORB/FAST algoritmalarının yanında yerini aldı. Eski FLANN tabanlı eşleştirme yerine Annoy tabanlı ANN (Approximate Nearest Neighbor) araması da daha hızlı ve modern bir alternatif olarak sunuluyor. Haar ve HOG dedektörleri opencv_contrib'e taşındı; derin öğrenme tabanlı dedektörler artık önerilen yol.
Görüntü işleme tarafında warpAffine, warpPerspective ve remap fonksiyonları baştan yazıldı. Bilinear/bicubic interpolasyon artık tablo yaklaşıklığı kullanmıyor, bu da hem daha yüksek doğruluk hem de %10 ila %300 arasında hızlanma anlamına geliyor. Kontur çıkarma için yeni TRUCO (Threaded Raster Unrestricted Contour Ownership) algoritması da çok çekirdekli sistemlerde ciddi performans artışı sağlıyor. Metin render tarafında ise STB tabanlı TrueType motoru ve gömülü Rubik fontu ile Unicode desteği genişletildi.
OpenCV 4.x vs 5.x: Paradigma Değişimi
OpenCV 4'ten 5'e geçiş, basit bir sürüm numarası artışından çok daha fazlası. İşte iki paradigmayı yan yana koyan bir karşılaştırma:
- Model çalıştırma: 4.x'te "model ONNX'e dönüşür mü, OpenCV'de çalışır mı?" diye endişelenirdiniz. 5.x'te modellerin %80'inden fazlası doğrudan çalışıyor. Geri kalanlar için ONNX Runtime fallback'i mevcut.
- Donanım hızlandırma: 4.x'te donanım hızlandırma ya hep ya hiçti; vendor kernel'ı eklemek büyük bir mühendislik işiydi. 5.x'te HAL, vendor kernel'larını plug-and-play entegre etmenizi sağlıyor.
- Veri tipleri: 4.x 8 temel tiple sınırlıydı. 5.x BF16, boolean, 64-bit integer'lar gibi modern AI iş yüklerinin ihtiyaç duyduğu tipleri ekliyor.
- Geliştirici deneyimi: 4.x'te C API kalıntıları ve Python 2 desteği kod tabanını şişiriyordu. 5.x temiz, modern bir C++17 ve Python 3.6+ kod tabanı sunuyor.
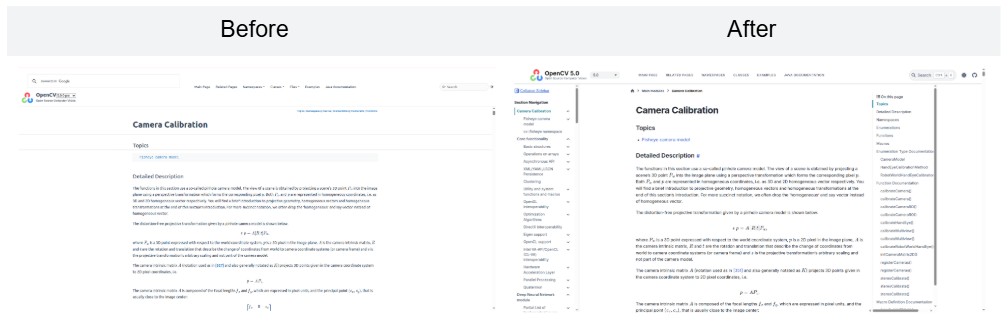
- Dokümantasyon: 4.x'in dokümantasyonunda gezinmek sabır işiydi; API referansı ve tutorial'lar ayrı ayrı yerlerdeydi. 5.x, Sphinx + Doxygen entegrasyonuyla modern, aranabilir ve tutorial'larla iç içe bir dokümantasyon sunuyor.
- Modül organizasyonu: 4.x'te calib3d ve features2d gibi aşırı büyük modüller vardı. 5.x'te işlevsellik mantıklı parçalara ayrılmış durumda.
Yol Haritası: GPU Desteği Yolda
OpenCV 5'in yeni DNN motoru şu an için yalnızca CPU üzerinde çalışıyor. Ancak ekip, native GPU desteğini yol haritasına koymuş durumda. GPU hızlandırmasına ihtiyacınız varsa şimdilik ENGINE_CLASSIC (CUDA/OpenVINO backend'leriyle) veya ENGINE_ORT (ONNX Runtime + NVIDIA execution provider ile) kullanabiliyorsunuz.
Gelecek sürümlerde HAL üzerinden daha fazla vendor backend'i (OpenVX, daha fazla ARM uzantısı, özel NPU'lar) ve yeni DNN motoruna native GPU desteği eklenmesi bekleniyor. OpenCV.ai ekibinin özellikle edge AI odaklı çalıştığını düşünürsek, bu yol haritası oldukça gerçekçi görünüyor. Ayrıca ONNX Runtime entegrasyonunun (ENGINE_ORT) geliştirilmesi ile GPU hızlandırması için ikinci bir yol da sürekli iyileştiriliyor.
Geliştirici Olarak Bugün Ne Yapmalısınız?
OpenCV 5, "yükseltmeli miyim" sorusunu "neden hala yükseltmedin"e çeviren bir sürüm. Özellikle şu senaryolarda vakit kaybetmeden geçiş yapmalısınız:
- DNN modelleriyle çalışıyorsanız: ONNX kapsamının %22'den %80'in üzerine çıkması başlı başına yükseltme sebebi. Artık modelinizi PyTorch'a geri dönmeden OpenCV içinde çalıştırabilirsiniz. YOLO, SAM, DINOv2 gibi modern modeller kutudan çıkar çıkmaz destekleniyor.
- Edge deployment yapıyorsanız: Yeni HAL ve Arm KleidiCV/Qualcomm FastCV entegrasyonu, gömülü sistemlerdeki performansı dramatik şekilde artıracak. RISC-V desteği ise açık kaynak donanım projelerinde çalışanlar için büyük bir haber.
- VLM/LLM entegrasyonu düşünüyorsanız: Tokenizer'dan KV-cache'e kadar tüm altyapının OpenCV içinde gelmesi, deployment karmaşasını sıfırlıyor. PyTorch veya Hugging Face transformers bağımlılığını ortadan kaldırabilirsiniz.
- Mevcut OpenCV 4.x projeniz varsa:
ENGINE_AUTOsayesinde kodunuzu değiştirmeden yeni motorun avantajlarını alabilirsiniz. Tek yapmanız gerekenpip install opencv-python==5.0. C++ projeleri için CMake'te sürümü güncellemeniz ve C++17 standardını etkinleştirmeniz yeterli.
Karpathy'nin Autoresearch projesinde gördüğümüz gibi, AI araçları giderek daha otonom hale geliyor ve bilgisayarlı görü bu dönüşümün merkezinde yer alıyor. OpenCV 5, bu yeni dünyada geliştiricilere sağlam, güvenilir ve en önemlisi tek bağımlılıkla çalışan bir temel sunuyor.
OpenCV 5'i edinmek için pip install opencv-python==5.0.0 komutunu çalıştırabilir, kaynak koda GitHub releases sayfasından ulaşabilir, detaylı sürüm notlarını OpenCV Wiki'de inceleyebilirsiniz. Resmi duyuru yazısı OpenCV blogunda yayında. 4.x'ten 5.x'e geçiş için migration guide da mevcut.
Görüşlerinizi yorumlarda paylaşmayı unutmayın. OpenCV 5'e geçtiniz mi? Hangi modelleri test ettiniz? Deneyimlerinizi merakla bekliyorum.
Efe Hüseyin Özkan
Yazılım Mühendisi & AI Geliştirici
Yapay zeka sistemleri, full-stack geliştirme ve ölçeklenebilir ürün mimarisi üzerine çalışıyor. Daha fazla teknik yazı için blogu takip edebilirsiniz.